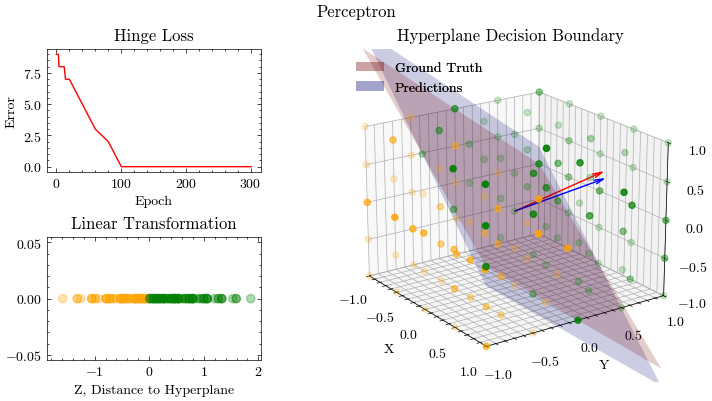
Perceptron#
The perceptron algorithm finds the optimal weights for a hyperplane to separate two classes, which is also known as binary classification.
Import the libraries
import numpy as np
# %matplotlib ipympl
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
from celluloid import Camera
import scienceplots
from IPython.display import Image
np.random.seed(0)
plt.style.use(["science", "no-latex"])
Training Dataset#
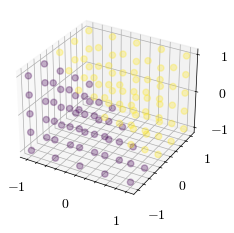
Let’s generate a dataset where the label is determined by a linear decision boundary. Our perceptron will layer find the weights of a normal vector to separate the dataset into two classes.
def generate_dataset(dims, normal_vector):
# create 3D grid of points
points = np.linspace(-1, 1, dims)
X, Y, Z = np.meshgrid(points, points, points)
# features are the x, y, z coordinates
features = np.column_stack((X.ravel(), Y.ravel(), Z.ravel()))
# labels are the side each point is on the hyperplane
distances = np.dot(features, normal_vector)
labels = np.where(distances >= 0, 1, -1)
return X, Y, Z, features, labels
# normalized normal vector
target_normal_vector = np.array([1.0, 1.0, 1.0])
target_normal_vector = target_normal_vector / np.linalg.norm(target_normal_vector)
scaling = 5
X, Y, Z, features, labels = generate_dataset(scaling, target_normal_vector)
fig = plt.figure()
ax = fig.add_subplot(111, projection="3d")
# plot the points
ax.scatter(features[:,0], features[:,1], features[:,2], marker='o', alpha=0.3, c=labels)
<mpl_toolkits.mplot3d.art3d.Path3DCollection at 0xffff4f3cae90>
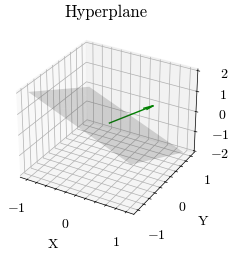
Hyperplane#
A hyperplane is a flat subspace that is one less dimension than the current space. It can be used to linearly separate a dataset. The equation of a hyperplane is defined by the vector normal to the hyperplane \(\vec{w}\)
\( \begin{align*} \vec{w} \cdot \vec{x} = w_1 x_1 + ... + w_n x_n = 0 \end{align*} \)
In our case, the \(\vec{x}\) is the x, y, z coordinate.
\( \begin{align*} \vec{w} \cdot \vec{x} &= 0 \\ &= w_1 x + w_2 y + w_3 z \end{align*} \)
Since we want to perform binary classification using the side a point is on relative from the hyperplane, the z value can be our predicted label
\( \begin{align*} z = -(w_1 x + w_2 y) / w_3 \end{align*} \)
def generate_hyperplane(scaling, normal_vector):
# create 2D points
points = np.linspace(-1, 1, scaling)
xx, yy = np.meshgrid(points, points)
# the z value is the defined by the hyperplane
zz = -(normal_vector[0] * xx + normal_vector[1] * yy) / normal_vector[2]
return xx, yy, zz
xx, yy, zz = generate_hyperplane(scaling, target_normal_vector)
# visualize the hyperplane
fig = plt.figure()
ax = fig.add_subplot(111, projection="3d")
# plot the hyperplane defined by the normal vector
ax.plot_surface(xx, yy, zz, alpha=0.2, color="gray")
ax.quiver(
0,
0,
0,
target_normal_vector[0],
target_normal_vector[1],
target_normal_vector[2],
color="green",
length=1,
arrow_length_ratio=0.2,
)
ax.set_xlabel("X")
ax.set_ylabel("Y")
ax.set_zlabel("Z")
ax.set_title("Hyperplane")
Text(0.5, 0.92, 'Hyperplane')
Loss Function: Hinge Loss#
Loss functions are used to quantify the error of a prediction.
The perceptron uses the hinge loss function, which returns 0 for correct predictions and 1 for incorrect predictions.
\( \begin{align*} L(\vec{w}, b) = max(0, -y(\vec{w} \cdot \vec{x} + b) \end{align*} \)
def hinge_loss(w, x, b, y):
return max(0.0, -y * (np.dot(w, x) + b))
Hinge Loss Gradient#
In order to run gradient descent to update our parameters, the gradients with respect to W and b must be calculated
Hinge Loss Gradient in Terms of B#
Loss function with respect to \(b\)
\( \frac{\partial L}{\partial b} = \begin{cases} 0 & -y(\vec{w} \cdot \vec{x} + b) > 1 \\ -y & \text{otherwise} \end{cases} \)
def hinge_loss_db(w, x, b, y):
if y * (np.dot(w, x) + b) <= 0.0:
return -y
return 0
Hinge Loss Gradient in Terms of W#
Loss function with respect to \(\vec{w}\)
\( \nabla_{W} [L(\vec{w}, b)] = \begin{cases} 0 & -y(\vec{w} \cdot \vec{x} + b) > 1 \\ -y x & \text{otherwise} \end{cases} \)
def hinge_loss_dw(w, x, b, y):
if y * (np.dot(w, x) + b) <= 0.0:
return -y * x
return np.zeros_like(x)
Graphing functions#
Utility functions to create the visualizations
def create_plots():
fig, ax = plt.subplots(2, 3, figsize=(16 / 9.0 * 4, 4 * 1), layout="constrained")
fig.suptitle("Perceptron")
ax[0, 0].set_xlabel("Epoch", fontweight="normal")
ax[0, 0].set_ylabel("Error", fontweight="normal")
ax[0, 0].set_title("Hinge Loss")
ax[1, 0].set_xlabel("Z, Distance to Hyperplane", fontweight="normal")
ax[1, 0].set_ylabel("", fontweight="normal")
ax[1, 0].set_title("Linear Transformation")
ax[0, 1].axis("off")
ax[0, 2].axis("off")
ax[1, 1].axis("off")
ax[1, 2].axis("off")
ax[1, 2] = fig.add_subplot(1, 2, 2, projection="3d")
ax[1, 2].set_xlabel("X")
ax[1, 2].set_ylabel("Y")
ax[1, 2].set_zlabel("Z")
ax[1, 2].set_title("Hyperplane Decision Boundary")
ax[1, 2].view_init(20, -35)
ax[1, 2].set_xlim(-1, 1)
ax[1, 2].set_ylim(-1, 1)
ax[1, 2].set_zlim(-1, 1)
camera = Camera(fig)
return ax[0, 0], ax[1, 0], ax[1, 2], camera
def plot_graphs(
ax0,
ax1,
ax2,
idx,
visible_err,
err_idx,
errors,
scaling,
target_normal_vector,
predictions,
features,
labels,
weights,
):
ax0.plot(
err_idx[visible_err][: idx + 1],
errors[visible_err][: idx + 1],
color="red",
)
# Ground truth
xx_target, yy_target, zz_target = generate_hyperplane(scaling, target_normal_vector)
ground_truth_legend = ax2.plot_surface(
xx_target,
yy_target,
zz_target,
color="red",
alpha=0.2,
label="Ground Truth",
)
ax2.quiver(
0,
0,
0,
target_normal_vector[0],
target_normal_vector[1],
target_normal_vector[2],
color="red",
length=1,
arrow_length_ratio=0.1,
)
# Perceptron predictions using 2D graph to show linear transformation
def generate_colors(arr):
return ["green" if d >= 0 else "orange" for d in arr]
ground_truth_colors = generate_colors(labels)
ax1.scatter(
predictions,
np.zeros(predictions.shape),
c=ground_truth_colors,
marker="o",
alpha=0.3,
)
# Perceptron predictions using 3D graph to show hyperplane
predictions_colors = generate_colors(predictions)
predictions_norm = np.maximum(1 - np.exp(-(predictions**2)), 0.2)
ax2.scatter(
features[:, 0],
features[:, 1],
features[:, 2],
c=predictions_colors,
marker="o",
alpha=predictions_norm,
)
xx, yy, zz = generate_hyperplane(scaling, weights)
predictions_legend = ax2.plot_surface(
xx,
yy,
zz,
color="blue",
alpha=0.2,
label="Prediction",
)
ax2.quiver(
0,
0,
0,
weights[0],
weights[1],
weights[2],
color="blue",
length=1,
arrow_length_ratio=0.1,
)
# Legend
ax2.legend(
(ground_truth_legend, predictions_legend),
("Ground Truth", "Predictions"),
loc="upper left",
)
Gradient Descent#
Gradient Descent will be used to update the weights and bias.
Bias Gradient Descent:
\( \begin{align*} b &= b - \eta \frac{\partial}{\partial b} [L(\vec{w}, b)] \\ &= b - \eta \begin{cases} 0 & -y(\vec{w} \cdot \vec{x} + b) > 1 \\ -y & \text{otherwise} \end{cases} \end{align*} \)
Weights Gradient Descent:
\( \begin{align*} \vec{w} &= \vec{w} - \eta \nabla_{W} [L(\vec{w}, b)] \\ &= \vec{w} - \eta \begin{cases} 0 & -y(\vec{w} \cdot \vec{x} + b) > 1 \\ -y x & \text{otherwise} \end{cases} \end{align*} \)
def gradient_descent(weights, x, bias, y, learning_rate):
weights = weights - learning_rate * hinge_loss_dw(weights, x, bias, y)
bias = bias - learning_rate * hinge_loss_db(weights, x, bias, y)
return weights, bias
Training the Model#
def fit(
weights,
bias,
target_normal_vector,
features,
labels,
X,
Y,
Z,
scaling,
epochs,
learning_rate,
optimizer,
output_filename,
):
err_idx = np.arange(1, epochs + 1)
errors = np.full(epochs, -1)
ax0, ax1, ax2, camera = create_plots()
for idx in range(epochs):
error = 0
predictions = np.array([])
for x, y in zip(features, labels):
# Forward Propagation
output = np.dot(weights, x) + bias
predictions = np.append(predictions, output)
# Store Error
error += hinge_loss(weights, x, bias, y)
# Gradient Descent
weights, bias = optimizer(weights, x, bias, y, learning_rate)
error /= len(X)
weights = weights / np.linalg.norm(weights)
if (
idx < 5
or (idx < 15 and idx % 2 == 0)
or (idx <= 50 and idx % 10 == 0)
or (idx <= 1000 and idx % 20 == 0)
or idx % 250 == 0
):
print(f"epoch: {idx}, MSE: {error}")
# Plot MSE
errors[idx] = error
visible_err = errors != -1
plot_graphs(
ax0,
ax1,
ax2,
idx,
visible_err,
err_idx,
errors,
scaling,
target_normal_vector,
predictions,
features,
labels,
weights,
)
camera.snap()
animation = camera.animate()
animation.save(output_filename, writer="pillow")
plt.show()
Let’s put everything together and train our Perceptron
weights = np.array([1.0, -1.0, -1.0])
weights = weights / np.linalg.norm(weights)
bias = 0
epochs = 301
learning_rate = 0.0005
output_filename = "perceptron.gif"
fit(
weights,
bias,
target_normal_vector,
features,
labels,
X,
Y,
Z,
scaling,
epochs,
learning_rate,
gradient_descent,
output_filename,
)
epoch: 0, MSE: 9.314269414709884
epoch: 1, MSE: 9.227024830601328
epoch: 2, MSE: 9.145087443313994
epoch: 3, MSE: 9.054781136556876
epoch: 4, MSE: 8.960407022428585
epoch: 6, MSE: 8.758853058777225
epoch: 8, MSE: 8.53921460232333
epoch: 10, MSE: 8.30137439690734
epoch: 12, MSE: 8.08268967439665
epoch: 14, MSE: 7.848010649913293
epoch: 20, MSE: 7.2399656649458395
epoch: 30, MSE: 6.264254344109915
epoch: 40, MSE: 5.307156953825979
epoch: 50, MSE: 4.404348110031334
epoch: 60, MSE: 3.5837443020613877
epoch: 80, MSE: 2.0340687540122775
epoch: 100, MSE: 0.9393759997635168
epoch: 120, MSE: 0.35445883826326263
epoch: 140, MSE: 0.12744345824321743
epoch: 160, MSE: 0.018715050957433404
epoch: 180, MSE: 0.0
epoch: 200, MSE: 0.0
epoch: 220, MSE: 0.0
epoch: 240, MSE: 0.0
epoch: 250, MSE: 0.0
epoch: 260, MSE: 0.0
epoch: 280, MSE: 0.0
epoch: 300, MSE: 0.0
Output GIF#
Image(filename=output_filename)